SICK Applications
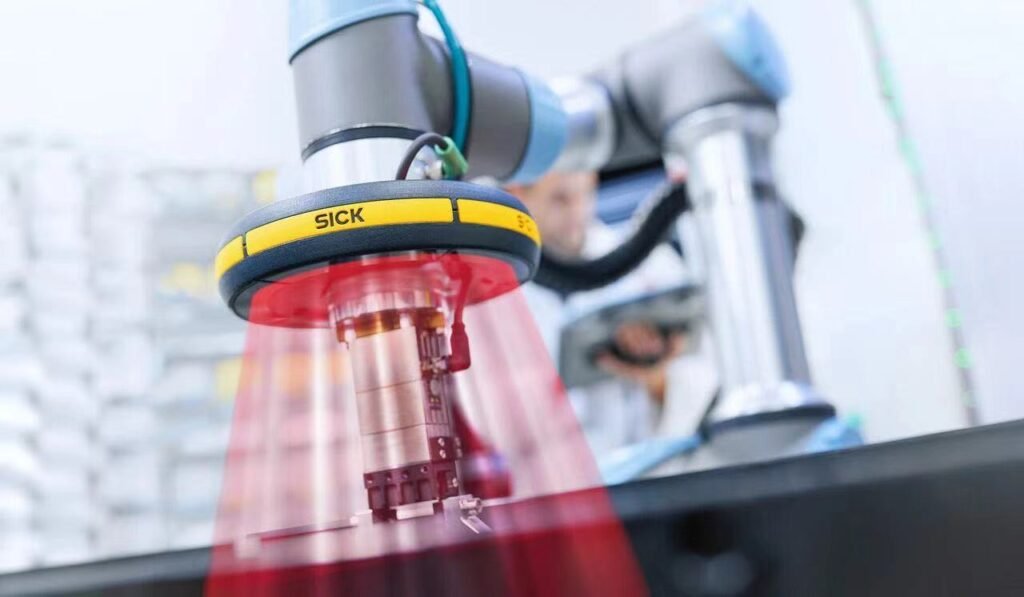
summarize;As the markethttps://heiautomation.com/ share of collaborative robots with integrated safety features continues to expand in the industrial sector, their ease of use and rapid deployment advantages have attracted a large number of applications. However, in practical applications, the safety protection of human-robot collaboration (HRC) is far more difficult than users expect, especially the risk protection against squeezing around the robot’s end effector. Relying solely on the force and power limitations of the robot itself cannot meet the safety requirements. Currently, the industry mostly protects the dangerous areas around the end effector by setting up large protective zones or installing fences, making true human-robot collaboration https://heiautomation.com/contact-us/applications difficult to implement. SICK has launched an end-of-arm safeguard device (End-of-Arm-Safeguard, abbreviated as EoAS) to address this issue. EOAS)
As the world’s first non-contact protection solution for the tool and workpiece areas of robots, it effectively reduces the risk of crushing and opens up new possibilities for collaborative safety concepts.
Industry background and securityhttps://www.youtube.com/@%E6%9B%BE%E6%85%A7%E5%A9%B7-z6j challenges.1.1 Current Application Status of Collaborative Robots:In recent years, the market share of industrial collaborative robots with integrated security functions has significantly increased. Their convenient operation and rapid deployment characteristics have made them highly attractive in various fields, and the prospect of large-scale implementation of human-machine collaboration applications has once injected strong impetus into the robotics industry.
However, in actual scenarios, there are many complex issues regarding the safety protection of https://heiautomation.com/human-machine collaboration applications: the risk of挤压from the end actuators (tools) and the carried workpieces of the robots is extremely difficult to protect, and relying solely on the force and power limitations of the robots cannot achieve the ideal safety protection effect, resulting in the relatively few actual realization of human-machine collaboration applications.
1.2 Core Security https://www.facebook.com/profile.php?id=100087291657130Challenges:In the application of collaborative robots, force-controlled robots can stop operating when the force exceeds the set limit. Combined with mechanical design and other safety measures, they can limit the contact pressure between the robot arm and the human body in cases of collision or squeezing, avoiding serious injuries. However, they still face the following key challenges:
· How to protect the safety of the areas around the robot tools and workpieces?
How to achieve collaborative handling of sharp/angled https://studio.youtube.com/channel/UC5jh-_J8N51BACPDqMnnT6Q/videos/short?filter=%5B%5D&sort=%7B%22columnType%22%3A%22date%22%2C%22sortOrder%22%3A%22DESCENDING%22%7Dobjects?
How to enhance workers’ acceptance of the safety of collaborative applications?
How to balance safety protection and production efficiency?
How to reduce the difficulty for integrators and end-users in collaborative safety engineering and achieve large-scale application?

Working principle and application https://heiautomation.com/about/conditions.2.1 Basic Working Principle:EOAS generates protection zones around the robot tools and workpieces. When the protection zone is violated, the robot will immediately slow down or stop safely.
Please note:
Due to the influence of tolerance signals, signal processing, and robot braking time, the length of the protection zone around the robot fixture and the workpiece must be greater than the “danger range” (that is, the length of the tool and workpiece measured from the front screen of the sensor).
The core problem: How to distinguish the operator’s hand in the robot’s field of vision from regularhttps://heiautomation.com/contact-us/ objects when the robot is working close to the surface? This can be solved by using the “process point approach” or “process path” functions (see below).
2.2 Key Function Principles.2.2.1 Process Point Proximity:To distinguish https://www.facebook.com/profile.php?id=100087291657130between regular objects in the sensor field and the operator’s hand, EOAS employs the “process point” method: 1. The process point starts from the “entry point” and the robot moves along the z-axis (from the perspective of the robot’s tool flange) in a straight line to the picking position (i.e., the “process point”), and then returns to the entry point along the original path after completion. 2. During the programming stage, the above approach and the sensor measurement data are stored as a reference model. During the automatic operation stage, when the robot approaches the same process point again, the actual approach curve is compared with the reference model; if they match, the robot can continue to approach the surface; if they do not match (such as the hand entering the protection area or changes in the environmenthttps://www.instagram.com/sunny.zeng5/ of the process point), EOAS immediately controls the robot to stop safely.
2.2.2 Process Path.For complexhttps://www.facebook.com/profile.php?id=100087291657130 robot movements, “process path” can be used instead of “process point”. 1. The process path supports the programming of robot movements in any direction and angle, starting from the “entry point”, moving along the custom path, and finally reaching the “exit point”. After the programming is completed, the path and sensor measurement data will be stored as a reference model. 3. During the automatic operation stage, when the robot moves along the process path, it will compare the actual path data with the reference model in real time. If they match, it will continue to move; if they do not match (such as the hand invading or changes in the path environment), it will immediately stop safely.
It is required that the entry point and exit point should be in the “free space” (without any intrusion https://heiautomation.com/product/of the sensor protection area).
2.2.3 Personnel and Cargo Separation Plane (Muting Plane).The EOAS personnel-vehicle separation function can divide the robot’s working area into “cooperative area and non-cooperative area”:
When the robot’s tool flange passeshttps://heiautomation.com/about/ through the personnel-vehicle separation plane and enters the non-cooperative area, the EOAS safety function Pause
When the robot returns to the collaborative area, the EOAS safety function is reactivated.
Note: The non-cooperative area needs to be secured through other means in accordance with the application-specific safety plan.

3.1 Core Application Areas.Currently, EOAS is mainly applicablehttps://heiautomation.com/festo-cylinders-versatile-applications-across-various-industries/ to the following collaborative robot application scenarios. In the future, through the upgrade of the EOAS URCap software, it will be expanded to areas such as dispensing, screw tightening, and non-safety automation functions:
Picking and placing (Pick & Place), loading and unloading (Machine Tending), handling and assembly (Handling) Assembly)
3.2 Typical Application Scenarios
Scenario 1: When a semi-automatic qualityhttps://heiautomation.com/about/ inspector analyzes the “inspection objects” provided by the robot at close range, the EOAS can protect the operator’s hands from the risk of compression; it enables a safe integration of manual and automated processes, saving space and enhancing worker acceptance.
Scenario 2: When feeding materials to the machine process, EOAS protects the dangerous tool/workpiece area, replacing the extensive scanning protection around the robot; it minimizes the required safety space, especially suitable for narrow working environments.
Scenario 3: When personnel and the robot approach the workpiece tray to replenish materials, the robot can operate normally without overall shutdown, improving processing efficiency; it realizes human-machine collaboration without hand挤压 risks, enhancing workerhttps://heiautomation.com/contact-us/ acceptance.

04
Service and Support System
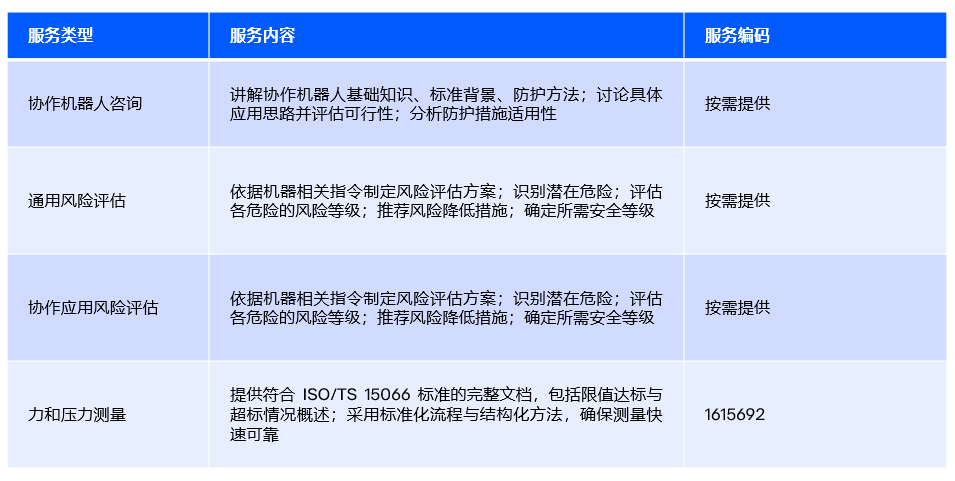
4.1 Safety Services for Collaborative Robots
SICK offers comprehensive safety services for collaborative and collaborative robots, as follows.
4.2 Product and Application Support
SICK has established a three-levelhttps://www.youtube.com/@%E6%9B%BE%E6%85%A7%E5%A9%B7-z6j/shorts support system to ensure the implementation and application of EOAS products: 1. Level 1 Support: Provided by sales units in various regions of China for application support. 2. Level 2 Support: Offered by SICK’s professional safety solution team for technical and application support. 3. Level 3 Support: Provided by the strategic product management and R&D team.
